
平台概述
高速磁浮轨道状态检测综合试验平台基于自主研发的自动定位走行平台,集成多种传感器和检测系统,结合机器视觉和神经网络技术,可在远程遥控或预设任务指令下自动进行高速磁浮轨道几何线形、局部偏差、表面损伤、轨道不平顺等项目的检测,极大提高了检测效率和准确性。
本平台长宽高尺寸为3.82m×3.54m×1.8m(含定子面检测装置),自重小于1.6t,续航70km,最高行驶速度30km/h,可一次完成上海高速磁浮示范线的全线检测。

图1 试验平台外观
功能简介
基于结构激光扫描的定子面局部偏差检测,与试验平台的定位系统结合,实现自动定位状态下的轨道定子面局部偏差精确检测。
定子面和导向面快照模式的局部偏差检测,利用多个激光位移计组成的检测阵列,实现在实验平台运动过程中的实时偏差检测,无需停车即可完成全线路的定子面和导向面局部偏差检测和超限报警,并在偏差超过设定允许值时调用激光扫描系统实现高精度复测。
线路断面检查及数字场景建立,利用图2所示安装在检测平台后部的断面扫描装置和惯性导航系统,在车辆运行过程中实时扫描平台周边场景,建立高速磁浮轨道上表面及线路周边环境的三维点云模型,构建线路断面数字场景。

图2 线路断面检查及数字场景建立系统
基于惯性基准法的轨道平顺性检测,利用惯性基准法原理,测量试验平台上搭载的检测横梁在平台前进过程中的加速度、转角、与轨道距离等数据,计算轨道的长波线形,实现高速磁浮轨道长波平顺性检测。
基于机器视觉的定子面和滑行面巡检,利用试验平台上搭载的面阵相机实时拍摄运行过程中的定子面和滑行面图像,使用机器视觉工具进行定子面和滑行面的状态检测和损伤报警。

图3 滑行面视觉检测系统
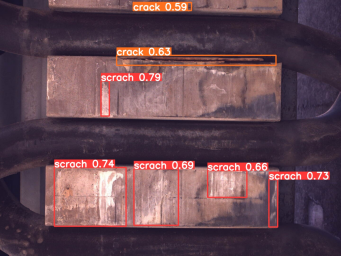

图4 机器视觉定子面损伤识别


